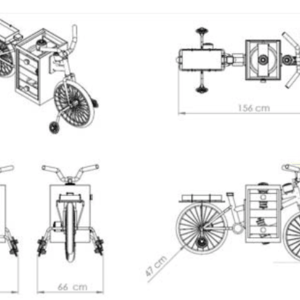
Unmanned Self-Balancing Bicycle with PID Controller 0 0 0 Implementation and Design of the AU Self-Balancing Bicycle (AUSB) Panuwat Janwattanapong Created: 03/06/2017
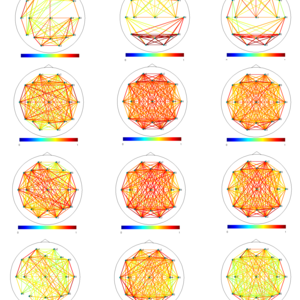
Classification of epileptiform discharges using connectivity analysis as a main feature 2 0 0 Brain Connectivity Analysis with Classification Panuwat Janwattanapong Created: 03/06/2017
Implementation of Text similarity and Text Categorization to Academic Research Paper 0 0 0 Academic Research Paper Classification Panuwat Janwattanapong Created: 03/06/2017