



Overview / Usage
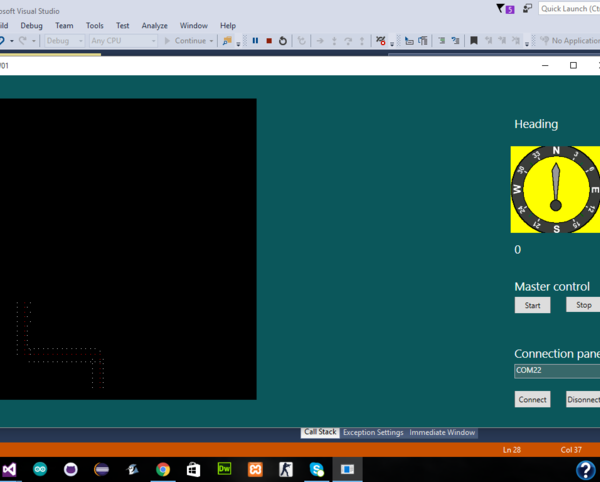
This project deals with the control of a RC car developed with Edison and Arduino that can be controlled using a PC/Laptop/Tablet. The initial version was developed with Arduino Leonardo. The upcoming version will incorporate Edison and use HCSR04 ultrasonic modules to localize itself in an unknown environment. Thus the upcoming version will be an autonomous UGV and it will navigate itself to a destined heading using a Grove digital compass at the same time it will be updating a 2D map of the area it passes through. The present version consists of a controller named Universal robot controller which is a WPF app developed for the sole purpose for controlling the bot. The communication is done by RF of frequency 2.4GHz. The picture of the bot shows the Arduino and some motor drivers. The raised platform at the back of the bot is for mounting the grove digital compass for the desired heading. The raised platform at the front of the robot is for mounting 3 HCSR04 modules for localization and mapping. Another screenshot is of the controller for manual control. Another screenshot displays is for the autonomous function of the robot. The upcoming version will incorporate both the controls in one app.
Facing some problems in mapping. Collaborations are highly welcome.