


adaptive neural network attitude control for a fixed wing UAV

- 0 Collaborators
controlling the attitude of a fixed wing UAV using an ANN technique ...learn more
Overview / Usage
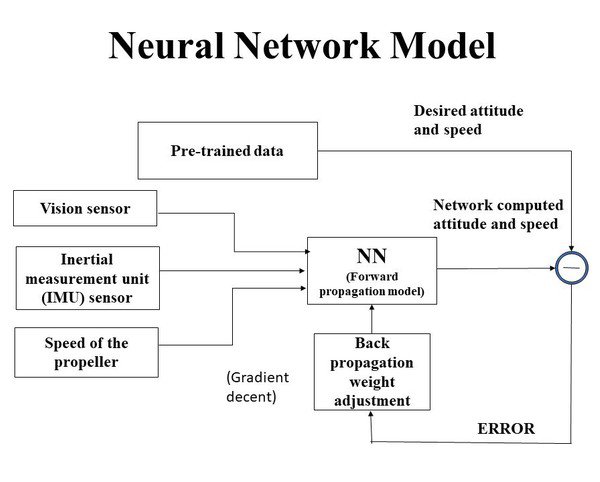
Unmanned Aerial Vehicles (UAV) are in peak research interest because of its wide variety of applications. This proposal aims at developing an attitude control for an UAV to react to changes in environment and be capable of re-planning, navigation through complex terrain at high speeds without human intervention or control, situational awareness, collision avoidance, on board information processing and can be able to operate outside the communication link limits. Using artificial intelligence (AI) technique such as artificial neural network, the UAV is programmed for its autonomous operations to satisfy the requirements. an existing UAV model has been utilized for reducing the workload and control algorithm will be fed into that system. By finding the uncertainty term in the dynamic equation using machine learning technique such as Artificial Neural Network (ANN), the UAV can be controlled autonomously for the required operations and need not be required human intervention for tuning its performance. the first phase of this project covers the design, data acquisition of UAV dynamics through control algorithm testing using software-in-loop simulation, The hardware-in-loop simulation, real-time testing of a prototype model and optimization will be carried out.